Покажем, что система сходящихся сил эквивалентна одной силе (равнодействующей), которая равна векторной сумме всех этих сил и проходит через точку пересечения их линий действия.
Пусть задана система сходящихся сил (ˉF1,ˉF2,.....,ˉFn), приложенных к абсолютно твердому телу (рис.5.а).
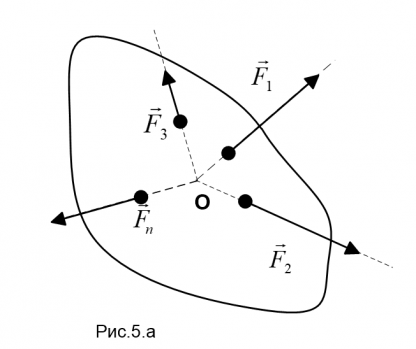
Согласно следствию из первых двух аксиом перенесем точки приложения сил вдоль их линий действия до точки O пересечения этих линий (рис.5.б).
Получим систему сил, приложенных в одной точке и эквивалентную исходной системе сходящихся сил. Сложим теперь силы ˉF1 и ˉF2. На основании третьей аксиомы, получим их равнодействующую ˉF12=ˉF1+ˉF2. Затем, сложив полученную силу с силой ˉF3, получим ˉF13=ˉF12+ˉF3=ˉF1+ˉF2+ˉF3.
Очевидно, что результат есть равнодействующая трех сил.

Осуществляя последовательно сложение сил, получим равнодействующую для всей системы сходящихся сил как
ˉF1n=ˉR=ˉF1+ˉF2+....+ˉFn=∑ni=1ˉFi (2)
что и требовалось доказать.
Пространственный многоугольник, построенный последовательным присоединением начала последующего вектора силы к концу предыдущего с замыканием контура равнодействующей, называется силовым многоугольником.
Если для нахождения равнодействующей при помощи силового многоугольника используются правила геометрии и тригонометрии, то такой способ нахождения равнодействующей называется геометрическим.
В случае плоской системы сходящихся сил можно воспользоваться плоским чертежом, откладывая силы в некотором масштабе; равнодействующая может быть определена непосредственным измерением на чертеже. Такой способ ее нахождения называется графическим.
Аналитический способ
Наиболее общим способом определения модуля и направления равнодействующей является аналитический способ, суть которого в проецировании равенства (2) на оси выбранной координатной системы, например декартовой. В этом случае проекции равнодействующей, ее модуль и направляющие косинусы рассчитываются, как
RX=∑ni=1FiX; RY=∑ni=1FiY; RZ=∑ni=1FiZ;
R=√R2X+R2Y+R2Z; cos(x,ˉR)=RXR;
cos(y,ˉR)=RYR; cos(z,ˉR)=RZR; (3)
Очевидно, что в случае равновесия системы сходящихся сил величина равнодействующей будет равна нулю. Тогда формулы, выражающие условия равновесия системы сходящихся сил, приложенных к абсолютно твердому телу, в векторном и скалярном виде будут:
ˉR=0. (4.а)
RX=∑ni=1FiX=0; RY=∑ni=1FiY=0;
RZ=∑ni=1FiZ=0. (4.б)
Если силы заданы их модулями и углами с координатными осями, то для применения аналитического способа надо уметь вычислять проекции этих сил на соответствующие оси.
В частном случае, когда тело находится в равновесии под действием трех непараллельных сил, линии действия двух из которых пересекаются в одной точке, справедлива следующая теорема: действующие на тело силы лежат в одной плоскости, а их линии действия пересекаются в одной точке. С доказательством теоремы можно ознакомиться, например, в [ 1 ].
ПРИМЕР 1 (задача 2.8 из [ 2 ]). Фонарь веса P подвешен в точке В к середине троса АВС, прикрепленного концами к крюкам А и С, находящимся на одной горизонтали. Определить натяжения T1 и T2 в частях троса АВ и ВС, если длина всего троса равна 20 метров и отклонение точки его подвеса от горизонтали ВД = 0.1м. Весом троса пренебречь.

Решим задачу геометрическим способом
Рассмотрим равновесие точки В. После отбрасывания связей (нити) и замены их действия реакциями (силы натяжения ˉT1,ˉT2 и ˉT3=ˉP), получаем силовую схему, изображенную на рис.6. Запишем уравнение равновесия плоской системы сходящихся сил:
ˉT1+ˉT2+ˉT3=0
В этом векторном треугольнике известны направления сил ˉT1 и ˉT2 (sinα=ВД/АВ=0.01), а так же величина и направление силы ˉT3=ˉP. Строим силовой треугольник по стороне и двум углам (см. рис. 7):
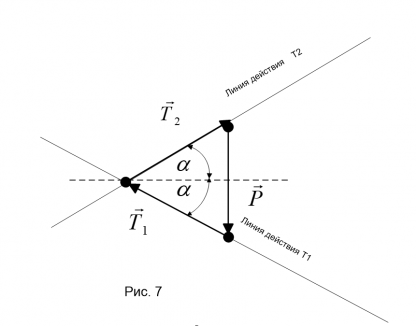
Из треугольника T1=T2=P2sinα=50P.
Заметим, что стремление уменьшить провис ВД приводит к существенному возрастанию сил натяжения частей троса (а так же равных им по величине усилий на крюки А и С). Отмеченное обстоятельство может вызвать либо разрыв троса, либо повреждение опорных устройств.
Решим задачу аналитическим способом
Для этого спроецируем (2.4) на оси декартовой координатной системы:
∑Fx=0=−T1cosα+T2cosα,
∑Fy=0=P−T1sinα−T2sinα .
Решив систему относительно сил натяжения, получим:
T1=T2=P2sinα=50P
Замечание: при увеличении числа активных (задаваемых) сил, действующих на объект равновесия, второй способ оказывается менее трудоемким, так как не требует построения векторного многоугольника. При действии на объект равновесия пространственной системы сходящихся сил построение векторного многоугольника становится еще более затруднительным.
Отмеченные обстоятельства делают аналитический способ более универсальным и менее трудоемким.
ПРИМЕР 2 (задача 6.4 из [ 2 ]). Найти усилия S1 и S2 в стержнях АВ и АС, а так же натяжение Т в тросе АД, если углы СВА и ВСА равны 600, а угол ОАД равен 300. Вес груза Р известен, крепление стержней к стене и между собой – шарниры.
РЕШЕНИЕ. Мысленно выделим объект равновесия – шарнир (точка) А и нарисуем систему сил, на него действующих (см. рис. 8).
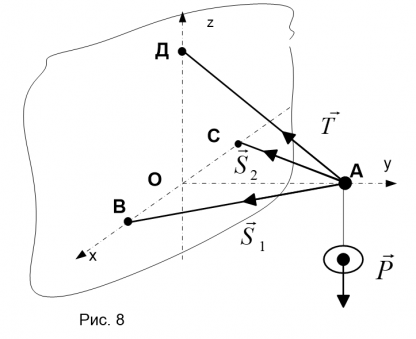
Запишем уравнения равновесия в аналитической форме:
∑Fx=0=S1cos600−S2cos600;
∑Fy=0=−S1sin600−S2sin600−Tcos300;
∑Fz=0=Tsin300−P .
Решив систему уравнений, получим: T=2P, S1=S2=−P.
Примечание: знак «минус» означает, что направления усилий противоположны указанным на рис.8 (при освобождении от связей полагалось, что и трос АД и стержни АВ и АС растянуты; результаты расчета предположение о растянутости стержней не подтвердили).